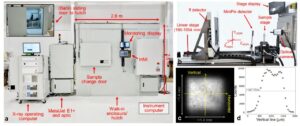
Снимок предпочтений политики в области выкачки во время тестирования на автономию автономии в области автономии в Океане Океана Океана в лаборатории реактивного движения. Кредит: Университет Иллинойса в Урбана-Шампейн
Внеземные посадки, отправленные для сбора образцов с поверхности отдаленных лун и планет, имеют ограниченное время и батарея для выполнения своей миссии. Исследователи аэрокосмической и компьютерной науки в Инженерном колледже Грейнджера, Университет Иллинойса, Урбана-Шампейн, обучили модель для самосознания и быстрого выкачки, а затем наблюдали, как он демонстрирует свои навыки на роботе на объекте НАСА.
Аэрокосмическая докторская степень Студент Пранай Тангеда сказал, что они обучали свою роботизированную подставку для сбора данных о различных материалах, от песка до камней, что привело к базе данных 6700 пунктов знаний. Две территория в области автономии в области автономии в Океане Ландера в Океане Ландера в лаборатории реактивного движения были совершенно новыми для модели, которая управляла роботизированной рукой JPL.
Исследование, «Обучение и автономия для выборки внеземной местности: был опубликован отчет о опыте развертывания Owlat», было опубликовано в AIAA SCITECH FORUMПолем
«У нас только что была сетевая ссылка через Интернет», — сказала Тангеда. «Я подключился к испытанию в JPL и получил изображение от камеры их роботизированной руки. Я запустил его через свою модель в режиме реального времени. Модель решила начать с каменного материала и научился с первой попытки, что это была невозможный материал «.
Основываясь на том, что он узнал из изображения и этой первой попытки, роботизированная рука перенесла в другую более вероятную область и успешно выхватила другую местность, более тонкий зерновой материал. Поскольку одним из требований миссии является то, что робот выкапывает определенный объем материала, команда JPL измерила объем каждого совка, пока робот не достигнет полной суммы.
Тангеда сказала, что, хотя эта работа была первоначально мотивирована исследованием океанских миров, их модель может использоваться на любой поверхности.
«Обычно, когда вы тренируете модели на основе данных, они работают только на одном и том же распределении данных. Красота нашего метода заключается в том, что нам не нужно было ничего менять, чтобы работать над тестовым стеном НАСА, потому что, в нашем методе, мы адаптируемся онлайн
«Несмотря на то, что мы никогда не видели ни одной из территорий на тестовом стенде НАСА, без точной настройки их данных, нам удалось развернуть модель, обученную здесь непосредственно там, и развертывание модели произошло удаленно — исключительно то, что будут делать автономные посадочные пособия роботов При развертывании на новой поверхности в космосе ».
AI-model-masters-new-t.mp4″>
AI-model-masters-new-t.mp4.jpg»>
AI-model-masters-new-t.mp4″>
Советник Тангеды, Мелькиор Орник, является лидером одного из четырех проектов, решающих различные проблемы. Единственная общность между ними заключается в том, что они являются частью программы Европы и используют этот посадку в качестве испытательного стенда для изучения различных проблем.
«Мы были одним из первых, кто продемонстрировал что-то значимое на их платформе, предназначенное для имитации поверхности Европы. Было здорово, наконец, увидеть то, над чем вы работали в течение нескольких месяцев, развернувшись на реальной платформе с высокой точностью. Было здорово увидеть Модель тестируется на совершенно другой местности и совершенно другой робот платформы, которую мы никогда не обучали.
Тангеда сказала, что отзывы, которые они получили от команды JPL, тоже были хорошими. «Они были рады, что мы смогли развернуть модель без многих изменений. Были некоторые проблемы, когда мы только начинали, но я узнал, что это потому, что мы были первыми, кто пытался развернуть модель на их платформе, поэтому Это были сетевые проблемы и некоторые простые ошибки в программном обеспечении, которые им пришлось исправить.
«Как только мы получили его работу, люди были удивлены, что он смог учиться в одном или двух образцах. Некоторые даже не верили в это, пока им не показали точные результаты и методологию».
Тангеда сказала, что одна из важных проблем, которые он и его команда должны были преодолеть, заключалась в том, чтобы принести их настройку в паритет с установкой НАСА.
«Наша модель была обучена камере в определенном месте с определенной формой совка. Местоположение и форма совка были двумя вещами, которые мы должны были обратиться. Чтобы убедиться, что у их робота была такая же форма совка, мы отправили им CAD Design, и они 3D напечатали его и прикрепили к своему роботу.
«Для камеры мы взяли их информацию о облаке RGB-D и воспроизводили ее в режиме реального времени с другой точки зрения, чтобы она соответствовала тому, что у нас было в нашем роботе, прежде чем мы отправили ее в модель. Таким образом, что модель увидела была похожая точка зрения на то, что он видел во время тренировки ».
Тангеда сказала, что они планируют опираться на это исследование для более автономных раскопок и автоматизации строительных работ, таких как копание канала. Людям гораздо проще делать эти вещи. Модели трудно научиться делать эти вещи автономно, потому что взаимодействия очень нюансы.
Больше информации:
Pranay Thangeda et al. AIAA SCITECH 2024 Форум (2024). Doi: 10.2514/6.2024-1962
Предоставлено Университетом Иллинойса в Урбана-Шампейн
Этот документ подлежит авторским правам. Помимо каких -либо справедливых сделок с целью частного исследования или исследования, никакая часть не может быть воспроизведена без письменного разрешения. Контент предоставляется только для информационных целей.