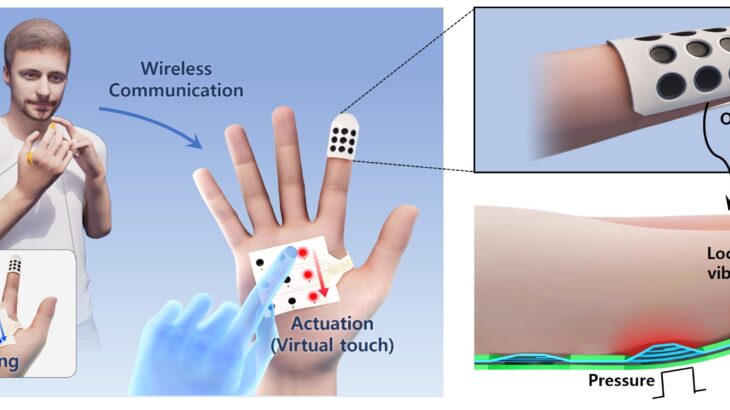
Сценарий двунаправленной тактильной связи с использованием тактичного патча. Кредит: Хи-кюнг Квон
По мере того, как технологии виртуальной реальности (VR) и дополненной реальности (AR) быстро развиваются, спрос на более захватывающий, многосенсорный опыт растет вместе с ними. Среди ключевых границ — тактильная обратная связь — способность физически чувствовать виртуальный мир.
В то время как носимые тактичные костюмы, оснащенные вибрационными двигателями или жидкостью, добились успехов в улучшении реализма, предоставление точных, разнообразных и естественных тактильных ощущений на кожу остается серьезной проблемой. Ограничение в значительной степени связано с отсутствием компактных, легких, высокоэффективных тактильных приводов.
Вот где наше исследование делает смелый шаг вперед. Мои коллеги и я разработали новый класс тонких, гибких тактильных приводов, предназначенных для предоставления богатой нюансированной тактичной обратной связи непосредственно на кожу.
Наша работа опубликована в журнале Наука достиженияПолем
Приведение наших крошечных тактильных приводов. Кредит: Хи-кюнг Квон крошечные, мощные тактильные приводы
Чтобы обеспечить плотные и разнообразные тактильные ощущения, приводы должны быть компактными и способными генерировать широкий спектр обратной связи. Обращаясь к этому, мы создали новый тактильный привод на основе диэлектрического привода эластомера (DEA). DEA производит значительное расширение площади при применении напряжения благодаря явлению, известному как стресс Maxwell. Комбинируя DEA с небольшой сжимающей пружиной, мы успешно преобразовали эту область расширения в линейное смещение.
Результатом является удивительно небольшой привод, имеющий диаметр всего 6 мм и толщину 1,1 мм. Несмотря на свою тонкую компактную конструкцию, привод может производить тактильные ощущения в диапазоне от давления до высокочастотных вибраций, при этом потребляя менее 60 МВт мощности. Впечатляюще, привод достаточно мощный, чтобы поднять вес 25 г, несмотря на очень легкий вес 32 мг.
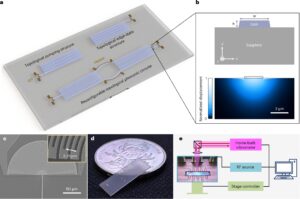
(а) Тонкое гибкое тактичное пятно для кончика пальца и ладони. (б) Сценарий VR с синхронизированной контактной геометрией виртуальной коробки. Кредит: Хи-кюнг Квон Гибкий, кожный конформационный патч
Основываясь на этом приводе, мы разработали гибкий тактичный патч, включающий в себя плотный набор девяти приводов в области размером с небольшую палочку. Изготовленная на тонкой гибкой печатной плате (PCB), весь патч весит всего 0,3 г и может комфортно соответствовать контурам кожи, не мешая естественным движениям рук. Каждый привод контролируется индивидуально, что позволяет патчу динамически рендеринг текстуры, имитации трехмерных поверхностей виртуальных объектов и предоставлять сложные шаблоны тактильной обратной связи.
Чтобы завершить систему, мы интегрировали отражающий массив Photomicrosensor, позволяя патчу не только предоставить тактичную обратную связь, но и ощущать прикосновение. Эта двунаправленная способность открывает дверь для беспроводной тактильной связи в средах VR или между пользователями, где ощущения сенсорных ощущений могут быть закодированы, переданы и воссозданы в режиме реального времени.
Глядя в будущее
Наша работа представляет тонкий, гибкий и легкий носимый тактичный патч, который стал возможным благодаря этой технологии тактильного привода следующего поколения. Помимо применений VR и AR, мы считаем, что эти приводы имеют потенциал для более широкого использования, в том числе в миниатюрной робототехнике, передовой протезировании и медицинских устройствах.
Соединяя разрыв между цифровыми и физическими мирами, эта технология знаменует собой захватывающий шаг к тому, чтобы сделать прикосновение естественной частью нашего цифрового опыта.
Эта история является частью диалога Science X, где исследователи могут сообщить о результатах из своих опубликованных исследовательских статей. Посетите эту страницу для получения информации о диалоговом окне Science X и о том, как участвовать.
Больше информации:
Jung-Hwan Youn et al., Привязанный к коже патч для универсального и дополненного тактильного взаимодействия, Наука достижения (2025). Два: 10.1126/sciadv.adt4839
Информация журнала:
Наука достижения
Юнг-Хван-постдоктрольный исследователь из Университета Иллинойса Урбана-Шампейн. Перед приходом он работал в качестве пост-дока в Институте исследования электроники телекоммуникации (ETRI). Он закончил свой докторскую степень в Корее продвинутый институт науки и технологии (KAIST). Его исследовательские интересы включают тактику, мягкую робототехнику и взаимодействие человека-робот.
Цитирование: Носимые тактики становятся все тоньше: гибкий тактичный патч позволяет вам почувствовать, как виртуальный мир (2025, 8 мая), полученный 8 мая 2025 года из этого документа, подвергается авторским правам. Помимо каких -либо справедливых сделок с целью частного исследования или исследования, никакая часть не может быть воспроизведена без письменного разрешения. Контент предоставляется только для информационных целей.