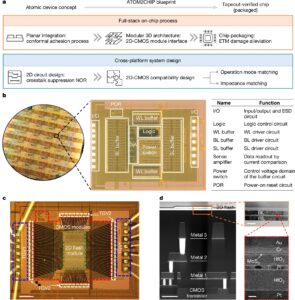
Исследователи MIT разработали систему, которая позволяет беспилотнику определять свое положение в 6D-пространстве в помещении, темных или низких условиях с использованием радиочастотных волн. Дрон имеет два радара; Горизонтальный радар имеет горизонтальную поляризацию, что означает, что он посылает сигналы горизонтально, в то время как вертикальный радар будет иметь вертикальную поляризацию. Кредит: Массачусетский технологический институт
В будущем автономные беспилотники могут быть использованы для трансляции инвентаризации между большими складами. Дрон может летать в полу-темно-структуру размером с несколько футбольных полей, застегнув вдоль сотен идентичных проходов, прежде чем стыковка в точном месте, где необходима его отгрузка.
Большинство сегодняшних беспилотников, вероятно, изо всех сил пытаются выполнить эту задачу, поскольку беспилотники обычно перемещаются на открытом воздухе, используя GPS, что не работает в помещении. Для внутренней навигации некоторые беспилотники используют компьютерное зрение или лидар, но оба метода ненадежны в темных средах или в комнатах с простыми стенами или повторяющимися функциями.
Исследователи MIT ввели новый подход, который позволяет беспилотнику само локализоваться или определять его положение в помещении, темно-темно-низко-визитной среде. Самолокализация является ключевым шагом в автономной навигации.
Исследователи разработали систему под названием Mifly, в которой беспилотник использует радиочастотные (RF) волны, отраженные одним тегом, помещенным в окружающую среду, для автономной само локализования.
Поскольку Mifly обеспечивает самолокализацию только с одной маленькой тегом, которая может быть прикреплена к стене, похожей на наклейку, было бы дешевле и проще в реализации, чем системы, которые требуют нескольких тегов. Кроме того, поскольку Mifly Tag отражает сигналы, отправляемые беспилотником, а не генерируя свой собственный сигнал, он может работать с очень низкой мощностью.
Два готовых радара, установленных на беспилотнике, позволяют локализоваться по отношению к тегу. Эти измерения слиты с данными с бортового компьютера беспилотника, что позволяет ему оценить свою траекторию.
Исследователи провели сотни полетов с реальными беспилотниками в помещении и обнаружили, что мифли последовательно локализуют беспилотник в менее 7 сантиметрах.
«По мере того, как наше понимание восприятия и вычислений улучшается, мы часто забываем о сигналах, которые находятся за пределами видимого спектра. Здесь мы смотрели за рамки GPS и компьютерное зрение на миллиметровые волны, и при этом мы открыли новые возможности для Дроны в помещении, которые были невозможны раньше », — говорит Фадель Адиб, доцент кафедры электротехники и компьютерных наук, директор группы« Сигнальная кинетика в лаборатории MIT Media »и старший автор статьи о Mifly.
Адиб присоединяется к статье авторами со-лидеров и научных сотрудников Мэйси Лэм и Лора Доддс; Алин Эйд, бывший постдок, который сейчас является доцентом в Мичиганском университете; и Джимми Хестер, технический директор и соучредитель Atheraxon, Inc. Исследование будет представлено на конференции IEEE по компьютерной коммуникации.
Обратно рассеянные сигналы
Чтобы позволить беспилотникам самолоказовать в темных, внутренних условиях, исследователи решили использовать миллиметровые волновые сигналы. Миллиметровые волны, которые обычно используются в современных радиолокациях и 5G -системах связи, работают в темноте и могут проходить через повседневные материалы, такие как картон, пластик и внутренние стены.
Они решили создать систему, которая может работать только с одним тегом, поэтому было бы дешевле и проще внедрить в коммерческих средах. Чтобы устройство оставалось низкой мощностью, они разработали тег обратного рассеяния, который отражает миллиметровые волновые сигналы, отправляемые встроенным радаром дрона. Дрон использует эти отражения для само локализования.
Но радар беспилотника будет получать сигналы, отраженные от окружающей среды, а не только тега. Исследователи преодолели эту проблему, используя методику, называемую модуляцией. Они настроили тег, чтобы добавить небольшую частоту к сигналу, который он рассеивает обратно на беспилотник.
«Теперь размышления от окружающей среды возвращаются на одной частоте, но отражения от тега возвращаются на разных частотах. Это позволяет нам отделить ответы и просто смотреть на ответ от тега», — говорит Доддс.
Тем не менее, только с одной меткой и одним радаром, исследователи могли рассчитать только измерения расстояния. Им нужно было несколько сигналов, чтобы вычислить местоположение беспилотника.
Вместо того, чтобы использовать больше тегов, они добавили второй радар к дрону, устанавливая один горизонтальный и один вертикально. Горизонтальный радар имеет горизонтальную поляризацию, что означает, что он посылает сигналы горизонтально, в то время как вертикальный радар будет иметь вертикальную поляризацию.
Они включали поляризацию в антенны метки, чтобы она мог изолировать отдельные сигналы, отправляемые каждым радаром.
«Поляризованные солнцезащитные очки получают определенную поляризацию света и блокируют другие поляризации. Мы применили ту же концепцию к миллиметровым волнам», — объясняет Лэм.
Кроме того, они применяли различные частоты модуляции к вертикальным и горизонтальным сигналам, что еще больше снижает помехи.
Точная оценка местоположения
Эта архитектура с двойной поляризацией и двойной модуляцией дает пространственное местоположение беспилотника. Но беспилотники также движутся под углом и повернуты, поэтому, чтобы дрон навигации, он должен оценить свое положение в пространстве по отношению к шести градусам свободы — с данными траектории, включая высоту, рынок и бросок в дополнение к обычному вперед/ назад, слева/вправо и вверх/вниз.
«Вращение беспилотников добавляет много двусмысленности к оценкам миллиметровых волн. Это большая проблема, потому что беспилотники немного вращаются, когда они летят», — говорит Доддс.
Они преодолели эти проблемы, используя подразделение инерционного измерения в бортовом инерционном измерении беспилотника, датчик, который измеряет ускорение, а также изменения в высоте и отношениях. Сплав этой информации с измерениями волны миллиметровых волн, отраженных тегом, они позволяют Mifly оценить всю позу беспилотника шести градусов фарда всего за несколько миллисекунд.
Они протестировали беспилотнику, оборудованное с мифтором в нескольких помещении, в том числе их лабораторию, место в области полета в MIT и тусклые туннели под зданиями кампуса. Система постоянно достигала высокой точности во всех средах, локализуя беспилотник до 7 сантиметров во многих экспериментах.
Кроме того, система была почти такой же точной в ситуациях, когда тег был заблокирован от взгляда беспилотника. Они достигли надежной оценки локализации до 6 метров от тега.
Это расстояние может быть расширено в будущем с использованием дополнительного аппаратного обеспечения, такого как мощные усилители, или путем улучшения дизайна радара и антенны. Исследователи также планируют провести дальнейшие исследования, включив мифли в автономную навигационную систему. Это может позволить беспилотнику решить, где летать и выполнить путь полета, используя технологию миллиметровых волн.
«Алгоритмы инфраструктуры и локализации, которые мы создаем для этой работы, являются прочной основой для продолжения и сделать их более надежными для обеспечения разнообразных коммерческих приложений», — говорит Лэм.
Больше информации:
Maisy Lam et al. 6D самолокализация беспилотников с использованием одного якоря обратного рассеяния с одной миллиметровой волной. www.mit.edu/~fadel/papers/mmdrone-infocom2025.pdf
Предоставлено Массачусетским технологическим институтом
Эта история переиздана любезно предоставлена MIT News (web.mit.edu/newsoffice/), популярный сайт, который охватывает новости о исследованиях, инновациях и преподавании MIT.
Этот документ подлежит авторским правам. Помимо каких -либо справедливых сделок с целью частного исследования или исследования, никакая часть не может быть воспроизведена без письменного разрешения. Контент предоставляется только для информационных целей.