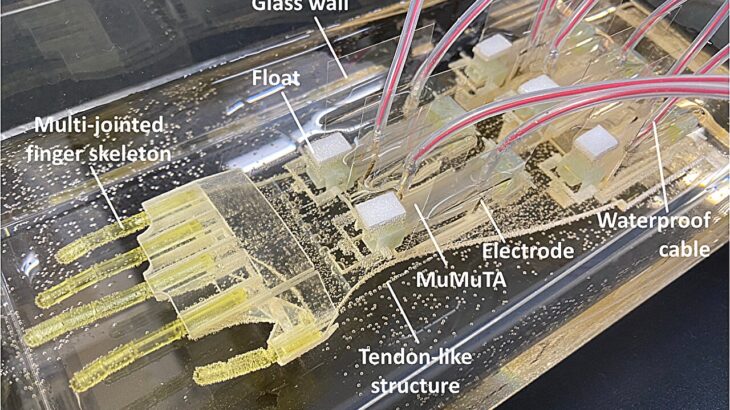
Мумуты установлены на предплечье руки парой для каждого пальца. Золотые электроды, вставленные в обе стороны каждой мумуты, несут электрический ток, который сокращает мышцы с различной силой. Кабельный механизм в руке превращает прямые сокращения мышц в вращательные движения для суставов. Кредит: X. Ren, Y. Morimoto и S. Takeuchi, 2025/ Научная робототехника
Биогибридная рука, которая может перемещать объекты и выполнять жест ножниц, была построена командой в Университете Токио и Университетом Васеда в Японии. Исследователи использовали тонкие струны выращенной в лаборатории мышечной ткани, связанной с сушиподобными рулонами, чтобы придать пальцам достаточно силы, чтобы сжиматься.
Эти множественные приводы мышечной ткани (Mumutas), созданные исследователями, являются основной разработкой для создания больших биогибридных конечностей. В настоящее время ограничиваясь лабораторной средой, Mumutas могут продвинуть будущие биогибридные протезирование, помощь в тестировании на наркотики на мышечной ткани и расширить потенциал биогибридной робототехники, чтобы имитировать формы реальной жизни.
«Rock, Paper, ножницы»-это классическая игра в школу или быстрый способ принимать решения для нерешительных. Но выберите бумагу, и вы проиграете этой руке робота, которая освоила искусство жеста ножниц. И хотя это может показаться простым движением, в сфере биогибридов и протезных конечностей, это скачок вперед на новые уровни реализма и удобства использования.
Рука изготовлена из 3D-печатного пластикового основания, с сухожилиями мышечной ткани человека, которые перемещают пальцы. До сих пор биогибридные устройства обычно были в гораздо меньшем масштабе (около 1 сантиметра) или ограничиваются более простыми или однорующими движениями. Напротив, биогибридная рука составляет 18 см в длину и имеет многооцененные пальцы, которые можно перемещать индивидуально, чтобы сделать жесты или в сочетании, чтобы манипулировать объектами.
«Нашим ключевым достижением было развитие Mumutas. Это тонкие нити мышечной ткани, выращенной в культуральной среде, а затем свернулись в пучок, как суши, чтобы сделать каждое сухожилие», — пояснил профессор Шодзи Такеучи из Университета Токио.
«Создание Mumutas позволило нам преодолеть нашу самую большую проблему, которая заключалась в том, чтобы обеспечить достаточную сократительную силу и длину в мышцах, чтобы стимулировать большую структуру руки».
Толстая мышечная ткань, которая необходима для перемещения больших конечностей, трудно выращивать в лаборатории, поскольку она страдает от некроза. Это когда недостаточное количество питательных веществ достигает центра мышц, что приводит к потере тканей. Однако, используя несколько тонких мышечных тканей, объединенных, чтобы действовать как одна большая мышца, команда смогла создать сухожилия с достаточной силой.
Мумуты стимулируются с использованием электрических токов, доставленных через водонепроницаемые кабели.
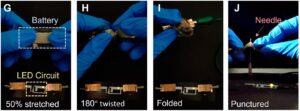
Чтобы проверить способности руки, команда манипулировала пальцами, чтобы сформировать жест ножниц, сжимая мизинец, безымянный палец и большой палец. Они также использовали пальцы, чтобы схватить и переместить кончик пипетки. Это продемонстрировало способность руки имитировать ряд действий, так как многооцененные пальцы могут быть согнуты либо отдельно, либо в то же время, впечатляющий подвиг.
Однако использование реальной мышечной ткани происходит с некоторыми недостатками, как может знать любой, кто был в спортзале.
«Хотя это и не совсем удивительно, было интересно, что сократительная сила тканей уменьшилась и показала признаки усталости после 10 минут электрической стимуляции, но в то же время восстановилась всего за один час после отдыха. Наблюдая за таким ответом на восстановление, аналогично тем, что у живых тканей , в инженерных мышечных тканях был замечательным и увлекательным результатом », — сказал Такеучи.
В настоящее время рука должна быть подвешена в жидкости так, чтобы «якоря» или «Связи», которые соединяют мышцы с рукой, могли плавать без трения, позволяя пальцам плавно двигаться. Тем не менее, команда считает, что при дальнейшем развитии можно будет построить свободно движущуюся руку.
Еще одна еще одна проблема с текущим дизайном заключается в том, что пальцы не могут быть преднамеренно возвращены в их прямую стартовую позицию, но делают это, перепрыгивая на место. Добавление упругого материала, чтобы привлечь их обратно в положение, или больше mumutas на задней части пальцев, которые сжимаются в противоположном направлении, позволило бы обеспечить больший контроль над движением пальцев.
-
Мумута состоит из множества тонких мышечных тканей, каждая из которых достаточно стройна для предотвращения центрального некроза, то есть потери ткани. Способность Мумуты сокращаться усиливается за счет выравнивания тканей с высоким содержанием волокон, которые культивированы на плоском месте. Пересетая эту листовую структуру в трехмерную форму минимизирует вариацию между отдельными мышечными тканями, что обеспечивает превосходную довольную. Кредит: X. Ren, Y. Morimoto и S. Takeuchi, 2025/ Научная робототехника
-
В биогибридном пальце используется кабельный механизм с использованием сухожильной структуры. Эта сухожилая структура соединяет многофункциональный палец с мумутой. Сокращение Мумуты тянет сухожильную структуру, изгиба пальцем. Кредит: X. Ren, Y. Morimoto и S. Takeuchi, 2025/ Научная робототехника
«Основная цель биогибридной робототехники — имитировать биологические системы, что требует масштабирования их размеров. Наша разработка Mumutas является важной вехой для достижения этого», — сказал Такеучи.
«Область биогибридной робототехники все еще находится в зачаточном состоянии, со многими основополагающими проблемами, которые необходимо преодолеть. Как только эти основные препятствия будут рассмотрены, эта технология может использоваться в продвинутых протезировании, а также может служить инструментом для понимания того, как функционируют мышечные ткани в биологических Системы, чтобы проверить хирургические процедуры или лекарства, нацеленные на мышечные ткани ».
Больше информации:
Синьчжу Рен и др., Биогибрид Научная робототехника (2025). Два: 10.1126/scirobotic.adr5512. www.science.org/doi/10.1126/scirobotes.adr5512
Предоставлено Университетом Токио
Этот документ подлежит авторским правам. Помимо каких -либо справедливых сделок с целью частного исследования или исследования, никакая часть не может быть воспроизведена без письменного разрешения. Контент предоставляется только для информационных целей.